Características estáticas de los sistemas de medida

En la mayoría de las aplicaciones la variable de
medida varía tan lentamente que con conocer las características estáticas del
sensor es suficiente. Estas características son:
- Exactitud:
Es la capacidad de un instrumento de dar
indicaciones que se aproxime al verdadero valor de la magnitud medida. El valor
exacto se obtiene mediante métodos de medidas validados internacionalmente. La
exactitud de obtiene mediante la calibración estática que no es mas que medir
poco a poco una variable, y se construye entonces el patrón de referencia.
La discrepancia entre el valor correcto y el
obtenido es el error. El error puede ser definido como:
a. Error absoluto, como la resta entre el valor
obtenido y el valor verdadero
b. Error relativo, como la relación que hay entre
el error absoluto y el valor verdadero expresado en tanto por ciento
c. Error referido a fondo escala. Es la forma
habitual de expresar el error en los instrumentos y consiste en dividir el
error absoluto entre el fondo escala del instrumento. El valor medido y su
exactitud deben darse con valores numéricos compatibles, de forma que el
resultado numérico de la medida no debe tener mas cifras de las que se puedan
considerar validas.
20ºC + 1ºC es correcto
20,5ºC+10% incorrecto
- Precisión:
Es la cualidad que caracteriza la capacidad de un
instrumento de medida de dar el mismo valor de la magnitud medida, al medir
varias veces en unas mismas condiciones determinadas, prescindiendo de su
concordancia o discrepancia con el valor real de dicha magnitud.
- Sensibilidad:
También llamado factor de escala es la pendiente de
la curva de calibración, que puede ser o no constante a lo largo de la escala
de medida La sensibilidad en un punto cualquiera x0 viene dada por:
S(x0) = dy/dx (evaluado en x = x0)
En los sensores se desea una alta sensibilidad y
constante.
- Linealidad:
Expresa el grado de coincidencia entre la curva de
calibración y una línea recta determinada. Hay varios tipos de linealidad:
a. Linealidad independiente: la línea de referencia
se obtiene por el método de los mínimos cuadrados.
b. Linealidad ajustada al cero: mínimos cuadrados
pero que pase por cero
c. Linealidad terminal
d. Linealidad a través de los extremos.
e. Linealidad teórica: la recta es la definida por
las previsiones teóricas formuladas al diseñar el sensor.
En los sistemas de medida es más importante la
precisión que la linealidad ya que la linealidad se puede corregir mediante
programación, pero la precisión depende del método de medida.
- Resolución:
Es el incremento mínimo de la entrada para el que
se obtiene un cambio en la salida.
- Histéresis:
Se refiere a la diferencia en la salida para una
misma entrada, según la dirección en que se alcance.
Características dinámicas
La presencia de inercias, capacidades,
y en general , de elementos que almacenen energía, hace que la respuesta de un
sensor a señales de entrada variable sea distinta a la que presenta cuando las
señales de entrada son constante, descrita mediante las características
estáticas, la descripción se hace aquí mediante las características dinámicas:
- Error dinámico: es la
diferencia entre el valor indicado y el valor exacto de la variable medida,
siendo nulo el error estático.
- La velocidad de respuesta:
indica la rapidez con que el sistema de medida responde a los cambios en la
variable de entrada.
La parte analógica de los sistemas de
medidas mas simples se describe con un modelo matemático que consiste en una
ecuación diferencial lineal con coeficiente constantes. La relación entre la
salida y la entrada viene dada por la función de transferencia, que es el
cociente entre las respectivas transformadas de Laplace. El orden de la función
de transferencia coincide con el número de elementos independientes que
almacenan energía en el sistema físico, en cualquiera de sus formas (bobina,
condensador, muelle, masa inercial, etc.).
La mayoría de los sensores se pueden
describir con modelos de orden cero, uno o dos, y respuesta de tipo pasa bajo.
La respuesta del resto de los elementos analógicos de un sistema de medida no
debe modificar la salida del sensor más que con la contribución de una ganancia
y una conformación de la respuesta en frecuencia, por ejemplo para eliminar
interferencias.
La función de transferencia de un
sistema de orden cero es:

donde k es la sensibilidad.
La función de transferencia de un
sistema de primer orden es:
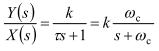
donde k se denomina ahora sensibilidad
estática, τ es la constante de tiempo y wc (=1/τ) es la frecuencia angular de
corte, que corresponde a una atenuación de amplitud de –3 dB respecto a la
respuesta en continua.
La función de transferencia de un sistema de segundo orden
es:
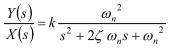
donde k es la sensibilidad estática, ωn
es la frecuencia angular (o pulsación) natural y ζ es el coeficiente de
amortiguamiento.
No hay comentarios:
Publicar un comentario